11
全部商品分类
 玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00
玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00 手机壳模具(UG8.5)¥0
手机壳模具(UG8.5)¥0 机械手-基于ADAMS的四自由度机械手运动学仿真(此份不含CAD图纸)...¥0
机械手-基于ADAMS的四自由度机械手运动学仿真(此份不含CAD图纸)...¥0 CAD字体¥0
CAD字体¥0 焊接机器人结构设计(毕业论文52页+CAD图纸+CAXA图纸+开题报告...¥43.00
焊接机器人结构设计(毕业论文52页+CAD图纸+CAXA图纸+开题报告...¥43.00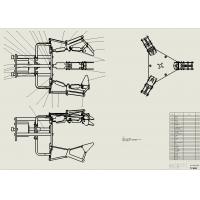 6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00
6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00 花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00
花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00 PLC控制的一种平面关节型机器人设计 PDF...¥0
PLC控制的一种平面关节型机器人设计 PDF...¥0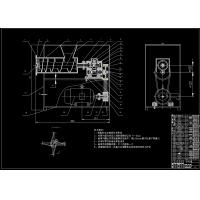 绞肉机的设计【16张CAD图纸+毕业论文】...¥43.00
绞肉机的设计【16张CAD图纸+毕业论文】...¥43.00 自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00
自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00基于西门子PLC(S7-200)控制的四自由度搬运机器人【设计说明书+CAD原理图+梯形图 程序 IO分配表+开题报告+任务书+文献综述】
摘 要
在现代产业中,出产过程的机械化,自动化已成为突出的主题,成为当今越来越应用广泛的工具,它主要是一种仿照人的手部操作而出来的机械叫做机械臂,又称为机械手,这种机器具有自动化的特点,按照程序员设定的固定步骤进行工作,可以对目标物体按照要求进行工作,也可以操作一定的工具完成任务。所以,这种应用在工作中的机械臂代替了人类的工作,避免了人类进行劳累,无聊的工作。
本文介绍了用PLC S7-200为控制电路的控制CPU,外加电器系统,输入输出电路组成的电控系统,以及机器人本体的机械设备,构成了基于PLC控制的搬运机器人。产业机械手的任务是搬运物品,要求把物品从一个工位搬到另一个工位,通过PLC控制机械手来模拟产业出产过程中设备的搬运过程,实现机器人自动举行货物搬运。
关键词:机械自动化、 PLC 、搬运机器人、CPU