11
全部商品分类
 玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00
玉米脱粒机的设计(说明书+cad图纸+pro三维图+SW三维图+开题报...¥45.00 手机壳模具(UG8.5)¥0
手机壳模具(UG8.5)¥0 机械手-基于ADAMS的四自由度机械手运动学仿真(此份不含CAD图纸)...¥0
机械手-基于ADAMS的四自由度机械手运动学仿真(此份不含CAD图纸)...¥0 CAD字体¥0
CAD字体¥0 焊接机器人结构设计(毕业论文52页+CAD图纸+CAXA图纸+开题报告...¥43.00
焊接机器人结构设计(毕业论文52页+CAD图纸+CAXA图纸+开题报告...¥43.00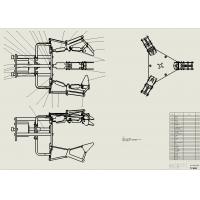 6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00
6个自由度的水果采摘机械手结构设计【CAD图+SW三维模型+文献翻译+...¥49.00 花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00
花生剥壳去壳机(cad+pro+SolidWorks+三维通用格式st...¥49.00 PLC控制的一种平面关节型机器人设计 PDF...¥0
PLC控制的一种平面关节型机器人设计 PDF...¥0 绞肉机的设计【16张CAD图纸+毕业论文】...¥43.00
绞肉机的设计【16张CAD图纸+毕业论文】...¥43.00 自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00
自动化立体仓库堆垛机设计(设计说明书+17张CAD图纸+开题报告+任务...¥49.00柑橘采摘机器人的结构设计
摘要
果实采摘是农业生产中的一个重要环节,需要大量的采摘人员,但由于农村人口城市化,农业从事人员的数量不断下降,人力成本不断上升,国内外都已经研发了许多的采摘机器人来解决这一问题。本课题设计的采摘机器人主要是针对柑橘树之类的果树,对采摘机器人的机械臂和末端执行器的结构进行设计。首先确定了机器臂的类型和设计的总体方案,再对机器人各部分进行受力分析计算,选择适合的电机和减速器,设计相关传动轴并进行校核,设计了相关的传动结构。根据电机和减速器的连接和固定,设计了机械臂的腕部、臂部和底座结构。
关键词:柑橘采摘;结构设计;农业机器人
Structure design of citrus picking robot
ABSTRACT
The fruit picking is an important part of agricultural production, it needs a large number of workers. However, due to the urbanization of the rural population, workers of the fruit picking is continuously declining and the labor cost is constantly rising. Different kinds of picking robots have been designed to solve this problem all around the world. The picking robots developed in this project is aimed at picking citrus trees alike so that the design of structures of the mechanical arm and end effector of the picking robot is of great significance in this project. First, determing the type of the robot arm and the overall design of the robot.Then, performing the force analysis and calculation of each part of the robot and selecting appropriate motor and reducer,designing and checking the relevant transmission shaft, relevant transmission structure is developed as well. At the same time, according to the connection and fixation of the motor and reducer, the arm, and base structure of the arm are designed.
Key words:Citrus picking; Structure design; Agricultural robot
目录
随着科技的不断发展,机械化种植已经在逐步替代传统的依靠人工的农业种植方式,农业生产已经发生了重大的改变。近年来,电子技术和计算机技术的飞速发展,原本用于工业的机器人已经走向农田,已经在农业生产中发挥了极其重要的作用,现在可以通过机器人来实现农业上的移栽、嫁接、除草、采摘和果蔬分离等作业。根据相关统计表明:由于人口老龄化以及农村的青年人都在去城市打工,从事农业方面的工作的人数在减少,而农业生产也逐渐规模化、多样化,劳动力也越来越缺乏。在果园种植中,仅仅果实采摘时需要大量劳动力,平时却不需要,部份种植园难以找到足够的临时从业人员,无法及时采摘,造成经济损失。即使有足够的临时劳动力,但他们由于不熟悉工作,这将会加大果实在采摘过程中的损伤几率。相关资料表明:果实采摘的花费已经占据了整个农业种植生产费用的40%以上,甚至有部分种植园已经达到50%的程度。为了降低种植的成本,从而提高农民的收入,研究和发展采摘机器人已经是农业发展的重要一环。采摘机器人是现代农业发展出来的一种能代替人工自主采摘果实的智能化、机械化和精准化的设备。但我国的农业机器人起步较晚,发达国家早在上世纪六十年代就已经开始对于农业机器人的研究,各发达国家在八十年代就纷纷结合自身的实际情况,研究相关的农业机器人,国内的农业机器人是在上个世纪九十年代的中期才开始的,发展得比较晚,与发达国家相比,还存在着明显的差距。但随着中国的经济和科技蓬勃发展,尤其是国家在政策上不断的扶持和引导农业的机械化、智能化,为农业机器人的发展提供了一片良好的土壤。
我国是世界上第一水果大国,我国的水果种植面积大约有800万公顷,占全球的果树种植总面积的21%左右;水果年总产量超过了5900多万吨,占世界所有的水果的总产量的13.4%,这两项指标都是排在全世界的第一。而柑橘营养丰富,深受人们的喜爱,我国的柑橘资源非常丰富,国家柑橘资源圃保存一千两百多份资源。在生产上栽培主要有柑橘属以及少量的金柑属、枳属。我国的柑橘主要种植在广东、湖南、四川、重庆、浙江、广西、福建、湖北、江西等九个省(区、市),产量占全国的90%以上。柑橘种植时一般都是种植园大量种植,采摘时间在十月到十二月之间,采摘方式主要还是以人工采摘为主。由于柑橘树属于小乔木,分枝多,枝扩展或略下垂,刺较少,采摘时为了保证柑橘的储存,需要将柑橘果实以及其小截果柄保留,而不是果实与果柄分离,这就是需要较大的分离力,从而导致人工长时间的采摘会出现疲劳,采摘效率下降。为了保证柑橘的新鲜,果农需要在很短的时间内采摘完柑橘,采摘强度大,效率低,而人力劳动成本在不断的上升,又无法通过大量增加人手来完成柑橘的采摘。人们需要在农业方面开发出代替手工的自动化设备,而作为集机械、电子、控制、计算机、人工智能等很多歌不同的学科的先进的技术集合在一起的现代自动化装备,机器人显然为降低劳动力成本提供了最佳的选项,不仅可以提高机械化水平,缓解劳动力不足,还可以避免因人工采摘带来的交通事故和人身安全问题。随着农业生产发展更加规模化和多样化,发展果树采摘机器人研究是历史走向的必然趋势,有着非常重要的意义。
………………
………………
………………